 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCLIP-Map: Structured Matrix Mapping for Parameter-Efficient CLIP Compression
Feb 05, 2026Contrastive Language-Image Pre-training (CLIP) has achieved widely applications in various computer vision tasks, e.g., text-to-image generation, Image-Text retrieval and Image captioning. However, CLIP suffers from high memory and computation cost, which prohibits its usage to the resource-limited application scenarios. Existing CLIP compression methods typically reduce the size of pre-trained CLIP weights by selecting their subset as weight inheritance for further retraining via mask optimization or important weight measurement. However, these select-based weight inheritance often compromises the feature presentation ability, especially on the extreme compression. In this paper, we propose a novel mapping-based CLIP compression framework, CLIP-Map. It leverages learnable matrices to map and combine pretrained weights by Full-Mapping with Kronecker Factorization, aiming to preserve as much information from the original weights as possible. To mitigate the optimization challenges introduced by the learnable mapping, we propose Diagonal Inheritance Initialization to reduce the distribution shifting problem for efficient and effective mapping learning. Extensive experimental results demonstrate that the proposed CLIP-Map outperforms select-based frameworks across various compression ratios, with particularly significant gains observed under high compression settings.
USS-Nav: Unified Spatio-Semantic Scene Graph for Lightweight UAV Zero-Shot Object Navigation
Feb 03, 2026Zero-Shot Object Navigation in unknown environments poses significant challenges for Unmanned Aerial Vehicles (UAVs) due to the conflict between high-level semantic reasoning requirements and limited onboard computational resources. To address this, we present USS-Nav, a lightweight framework that incrementally constructs a Unified Spatio-Semantic scene graph and enables efficient Large Language Model (LLM)-augmented Zero-Shot Object Navigation in unknown environments. Specifically, we introduce an incremental Spatial Connectivity Graph generation method utilizing polyhedral expansion to capture global geometric topology, which is dynamically partitioned into semantic regions via graph clustering. Concurrently, open-vocabulary object semantics are instantiated and anchored to this topology to form a hierarchical environmental representation. Leveraging this hierarchical structure, we present a coarse-to-fine exploration strategy: LLM grounded in the scene graph's semantics to determine global target regions, while a local planner optimizes frontier coverage based on information gain. Experimental results demonstrate that our framework outperforms state-of-the-art methods in terms of computational efficiency and real-time update frequency (15 Hz) on a resource-constrained platform. Furthermore, ablation studies confirm the effectiveness of our framework, showing substantial improvements in Success weighted by Path Length (SPL). The source code will be made publicly available to foster further research.
SP^2DPO: An LLM-assisted Semantic Per-Pair DPO Generalization
Jan 29, 2026Direct Preference Optimization (DPO) controls the trade-off between fitting preference labels and staying close to a reference model using a single global temperature beta, implicitly treating all preference pairs as equally informative. Real-world preference corpora are heterogeneous: they mix high-signal, objective failures (for example, safety, factuality, instruction violations) with low-signal or subjective distinctions (for example, style), and also include label noise. We introduce our method, SP2DPO (Semantic Per-Pair DPO), a generalization that replaces the global temperature with an instance-specific schedule beta_i pre-decided offline from structured semantic-gap annotations (category, magnitude, confidence) produced by teacher language models. We instantiate this procedure on the UltraFeedback preference corpus (59,960 pairs), enabling large-scale construction of an auditable beta_i artifact, and incur zero training-time overhead: the inner-loop optimizer remains standard DPO with beta set per pair. We focus our empirical study on AlpacaEval 2.0, reporting both raw win rate and length-controlled win rate. Across four open-weight, instruction-tuned student backbones (4B-8B), SP2DPO is competitive with a tuned global-beta DPO baseline and improves AlpacaEval 2.0 length-controlled win rate on two of four backbones, while avoiding per-model beta sweeps. All code, annotations, and artifacts will be released.
SLM-SS: Speech Language Model for Generative Speech Separation
Jan 27, 2026Speech separation (SS) has advanced significantly with neural network-based methods, showing improved performance on signal-level metrics. However, these methods often struggle to maintain speech intelligibility in the separated signals, which can negatively affect the performance of downstream tasks such as speech recognition. In this work, we propose SLM-SS, a novel approach that applies speech language models to SS, aiming to enhance the intelligibility and coherence of the separated signals. We frame SS as discrete multi-codebook sequence generation, using Encoder-Decoder models to map quantized speech mixtures to target tokens. In addition to the autoregressive modeling strategy, we introduce a non-autoregressive model to improve decoding efficiency for residual tokens. Experimental results on the LibriMix dataset demonstrate that our approach shows significantly better preservation of speech intelligibility, leading to improved linguistic consistency in a variety of downstream tasks compared to existing approaches.
USE: A Unified Model for Universal Sound Separation and Extraction
Dec 24, 2025Sound separation (SS) and target sound extraction (TSE) are fundamental techniques for addressing complex acoustic scenarios. While existing SS methods struggle with determining the unknown number of sound sources, TSE approaches require precisely specified clues to achieve optimal performance. This paper proposes a unified framework that synergistically combines SS and TSE to overcome their individual limitations. Our architecture employs two complementary components: 1) An Encoder-Decoder Attractor (EDA) network that automatically infers both the source count and corresponding acoustic clues for SS, and 2) A multi-modal fusion network that precisely interprets diverse user-provided clues (acoustic, semantic, or visual) for TSE. Through joint training with cross-task consistency constraints, we establish a unified latent space that bridges both paradigms. During inference, the system adaptively operates in either fully autonomous SS mode or clue-driven TSE mode. Experiments demonstrate remarkable performance in both tasks, with notable improvements of 1.4 dB SDR improvement in SS compared to baseline and 86\% TSE accuracy.
Step-GUI Technical Report
Dec 19, 2025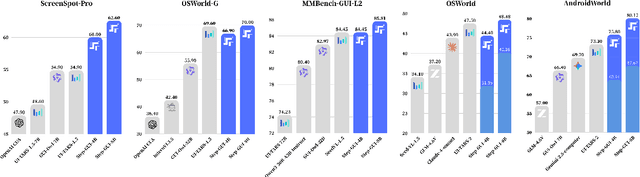
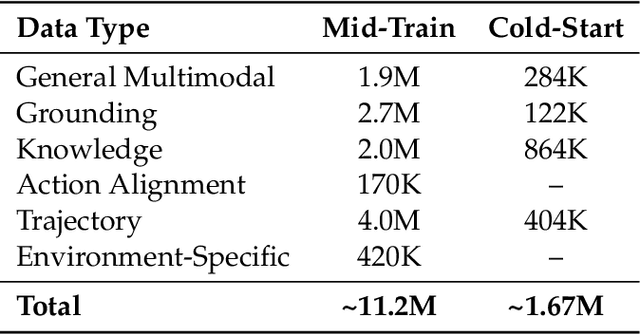
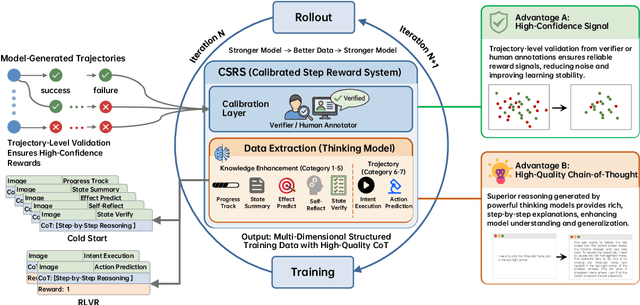
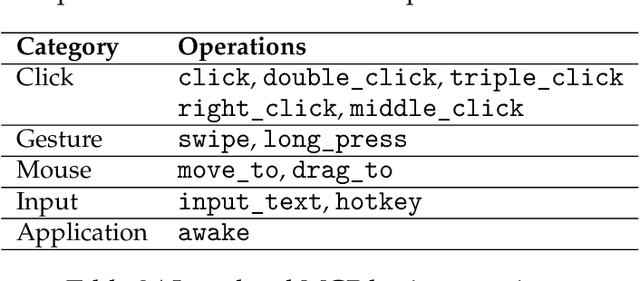
Recent advances in multimodal large language models unlock unprecedented opportunities for GUI automation. However, a fundamental challenge remains: how to efficiently acquire high-quality training data while maintaining annotation reliability? We introduce a self-evolving training pipeline powered by the Calibrated Step Reward System, which converts model-generated trajectories into reliable training signals through trajectory-level calibration, achieving >90% annotation accuracy with 10-100x lower cost. Leveraging this pipeline, we introduce Step-GUI, a family of models (4B/8B) that achieves state-of-the-art GUI performance (8B: 80.2% AndroidWorld, 48.5% OSWorld, 62.6% ScreenShot-Pro) while maintaining robust general capabilities. As GUI agent capabilities improve, practical deployment demands standardized interfaces across heterogeneous devices while protecting user privacy. To this end, we propose GUI-MCP, the first Model Context Protocol for GUI automation with hierarchical architecture that combines low-level atomic operations and high-level task delegation to local specialist models, enabling high-privacy execution where sensitive data stays on-device. Finally, to assess whether agents can handle authentic everyday usage, we introduce AndroidDaily, a benchmark grounded in real-world mobile usage patterns with 3146 static actions and 235 end-to-end tasks across high-frequency daily scenarios (8B: static 89.91%, end-to-end 52.50%). Our work advances the development of practical GUI agents and demonstrates strong potential for real-world deployment in everyday digital interactions.
VLA-AN: An Efficient and Onboard Vision-Language-Action Framework for Aerial Navigation in Complex Environments
Dec 19, 2025



This paper proposes VLA-AN, an efficient and onboard Vision-Language-Action (VLA) framework dedicated to autonomous drone navigation in complex environments. VLA-AN addresses four major limitations of existing large aerial navigation models: the data domain gap, insufficient temporal navigation with reasoning, safety issues with generative action policies, and onboard deployment constraints. First, we construct a high-fidelity dataset utilizing 3D Gaussian Splatting (3D-GS) to effectively bridge the domain gap. Second, we introduce a progressive three-stage training framework that sequentially reinforces scene comprehension, core flight skills, and complex navigation capabilities. Third, we design a lightweight, real-time action module coupled with geometric safety correction. This module ensures fast, collision-free, and stable command generation, mitigating the safety risks inherent in stochastic generative policies. Finally, through deep optimization of the onboard deployment pipeline, VLA-AN achieves a robust real-time 8.3x improvement in inference throughput on resource-constrained UAVs. Extensive experiments demonstrate that VLA-AN significantly improves spatial grounding, scene reasoning, and long-horizon navigation, achieving a maximum single-task success rate of 98.1%, and providing an efficient, practical solution for realizing full-chain closed-loop autonomy in lightweight aerial robots.
Flying in Clutter on Monocular RGB by Learning in 3D Radiance Fields with Domain Adaptation
Dec 19, 2025Modern autonomous navigation systems predominantly rely on lidar and depth cameras. However, a fundamental question remains: Can flying robots navigate in clutter using solely monocular RGB images? Given the prohibitive costs of real-world data collection, learning policies in simulation offers a promising path. Yet, deploying such policies directly in the physical world is hindered by the significant sim-to-real perception gap. Thus, we propose a framework that couples the photorealism of 3D Gaussian Splatting (3DGS) environments with Adversarial Domain Adaptation. By training in high-fidelity simulation while explicitly minimizing feature discrepancy, our method ensures the policy relies on domain-invariant cues. Experimental results demonstrate that our policy achieves robust zero-shot transfer to the physical world, enabling safe and agile flight in unstructured environments with varying illumination.
SAM 2++: Tracking Anything at Any Granularity
Oct 22, 2025Video tracking aims at finding the specific target in subsequent frames given its initial state. Due to the varying granularity of target states across different tasks, most existing trackers are tailored to a single task and heavily rely on custom-designed modules within the individual task, which limits their generalization and leads to redundancy in both model design and parameters. To unify video tracking tasks, we present SAM 2++, a unified model towards tracking at any granularity, including masks, boxes, and points. First, to extend target granularity, we design task-specific prompts to encode various task inputs into general prompt embeddings, and a unified decoder to unify diverse task results into a unified form pre-output. Next, to satisfy memory matching, the core operation of tracking, we introduce a task-adaptive memory mechanism that unifies memory across different granularities. Finally, we introduce a customized data engine to support tracking training at any granularity, producing a large and diverse video tracking dataset with rich annotations at three granularities, termed Tracking-Any-Granularity, which represents a comprehensive resource for training and benchmarking on unified tracking. Comprehensive experiments on multiple benchmarks confirm that SAM 2++ sets a new state of the art across diverse tracking tasks at different granularities, establishing a unified and robust tracking framework.
SecureAgentBench: Benchmarking Secure Code Generation under Realistic Vulnerability Scenarios
Sep 26, 2025Large language model (LLM) powered code agents are rapidly transforming software engineering by automating tasks such as testing, debugging, and repairing, yet the security risks of their generated code have become a critical concern. Existing benchmarks have offered valuable insights but remain insufficient: they often overlook the genuine context in which vulnerabilities were introduced or adopt narrow evaluation protocols that fail to capture either functional correctness or newly introduced vulnerabilities. We therefore introduce SecureAgentBench, a benchmark of 105 coding tasks designed to rigorously evaluate code agents' capabilities in secure code generation. Each task includes (i) realistic task settings that require multi-file edits in large repositories, (ii) aligned contexts based on real-world open-source vulnerabilities with precisely identified introduction points, and (iii) comprehensive evaluation that combines functionality testing, vulnerability checking through proof-of-concept exploits, and detection of newly introduced vulnerabilities using static analysis. We evaluate three representative agents (SWE-agent, OpenHands, and Aider) with three state-of-the-art LLMs (Claude 3.7 Sonnet, GPT-4.1, and DeepSeek-V3.1). Results show that (i) current agents struggle to produce secure code, as even the best-performing one, SWE-agent supported by DeepSeek-V3.1, achieves merely 15.2% correct-and-secure solutions, (ii) some agents produce functionally correct code but still introduce vulnerabilities, including new ones not previously recorded, and (iii) adding explicit security instructions for agents does not significantly improve secure coding, underscoring the need for further research. These findings establish SecureAgentBench as a rigorous benchmark for secure code generation and a step toward more reliable software development with LLMs.